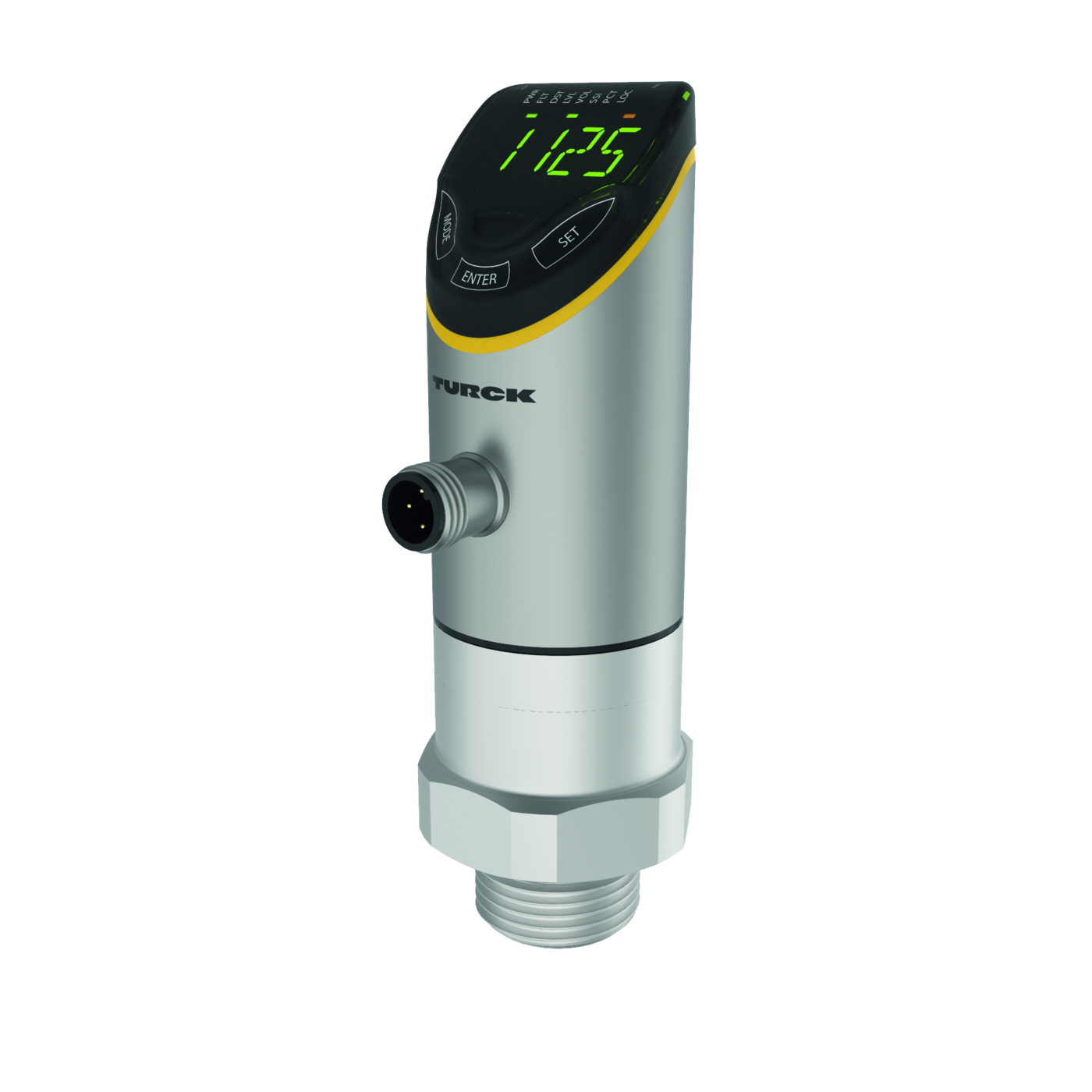
Radarsensor – Füllstand
Eigenschaften
- • Reichweite: 10 m
- • Blindzone: 35 cm
- • Auflösung: 1 mm
- • Öffnungswinkel der Radarkeule: ±5°
- • Distanz-, Level-, Volumen- oder %-Ausgabe
- • Zugelassen nach ETSI 305550-2
- • Zugelassen nach FCC /CFR. 47 Part 15.
- • Stecker M12x1, 4-polig
- • Betriebsspannung 18…33 VDC
- • Schaltausgang umschaltbar PNP / NPN
- • IO-Link
- • 4-stelliges, zweifarbiges 14-Segment Display
- • 180° drehbares Gehäuse nach Montage des Prozessanschlusses
- • Prozessanschluss G3/4“
- • Druckbeständigkeit -1…16 bar rel.
Funktionsprinzip
Ein FMCW‐Radar ist ein frequenzmoduliertes Dauerstrichradar. Die Abkürzung entstammt dem englischen Begriff Frequency Modulated Continuous Wave. Unmodulierte Dauerstrichradargeräte haben den Nachteil, dass sie wegen fehlenden Zeitbezuges keine Entfernung messen können. Ein solcher Zeitbezug zur Messung der Entfernung unbewegter Objekte kann aber mit Hilfe einer Frequenzmodulation erzeugt werden. Bei dieser Methode wird ein Signal ausgesendet, welches sich ständig in der Frequenz ändert. Um den Frequenzbereich zu begrenzen und die Auswertung zu erleichtern, wird eine periodische, linear auf‐ und absteigende Frequenz verwendet. Der Betrag der Änderungsrate df/dt ist dabei konstant. Wird ein Echosignal empfangen, dann hat dieses eine Laufzeitverschiebung wie beim Pulsradar und somit eine abweichende Frequenz, die proportional zur Entfernung ist.
Elektrische Daten
| DC Bemessungsbetriebsstrom Ie | ≤ 250 mA |
| Ansprechzeit typisch | < 10 ms |
| Schaltfrequenz | bis 10 Hz |
| Spannungsfall bei Ie | ≤ 2 V |
| Kurzschlussschutz | ja/taktend |
| Verpolungsschutz | ja |
| Ausgangsfunktion | Öffner/Schließer programmierbar, PNP/ |
| Ausgangsfunktion | NPN |
| Ausgang 2 | Schaltausgang |
| Kommunikationsprotokoll | IO-Link |
| Restwelligkeit | < 10 % Uss |
| Leerlaufstrom | bis 100 mA |
| Reststrom | ≤ 0.1 mA |
| Betriebsspannung UB | von 17 bis 33 VDC |
Mechanische Daten
| Schaltzustandsanzeige | 2 x LED, gelb |
| EMV | EN 61000-6-2:2019 |
| EMV | ETSI EN 301489-3 v.1.6.1 |
| Schwingungsfestigkeit | 20 g (10…2000Hz), |
| Elektrischer Anschluss | Steckverbinder, M12 x 1 |
| Druckfestigkeit | 16 bar |
| Objektiv | Kunststoff, PEEK |
| Umgebungstemperatur | von -25 bis 65 °C |
| Schockprüfung | EN 60068-2-27 |
| Prozessanschluss | G 3/4'' |
| Zulassungen | cULus |
| Zulassungen | CE |
| Zulassungen | FCC |
| Zulassungen | ETSI |
| Lagertemperatur | von -40 bis 85 °C |
| Bauform | mit Anzeige (Fühler integriert), LRS |
| Max. Anziehdrehmoment Gehäusemutter | 45 Nm |
| Gehäusewerkstoff | Edelstahl/Kunststoff, 1.4404 (AISI 316L)/ |
| Gehäusewerkstoff | Polyarylamid 50% GF UL 94 V-0 |
| Gehäusewerkstoff | PEEK |
| Schockfestigkeit | 50 g (11 ms) |
| Schutzart (IP) | IP67 |
| Schutzart (IP) | IP69K |
| Abmessung | Ø 38 x 132.3 x 38 x 50.2 mm |
IO-Link
| Maximale Leitungslänge | 20 m |
| IO-Link Porttyp | Class A |
| Kommunikationsmodus | COM 3 (230.4 kBaud) |
| Funktion Pin 4 | IO-Link |
| Funktion Pin 2 | DI |
| Frametyp | 2.2 |
| Prozessdatenbreite | 80 bit |
| Mindestzykluszeit | 5 ms |
| Profilunterstützung | Smart Sensor Profil |
| Schaltpunktinformation | 2 bit |
| IO-Link Spezifikation | V 1.1 |
| Messwertinformation | 64 bit |
Radar Daten
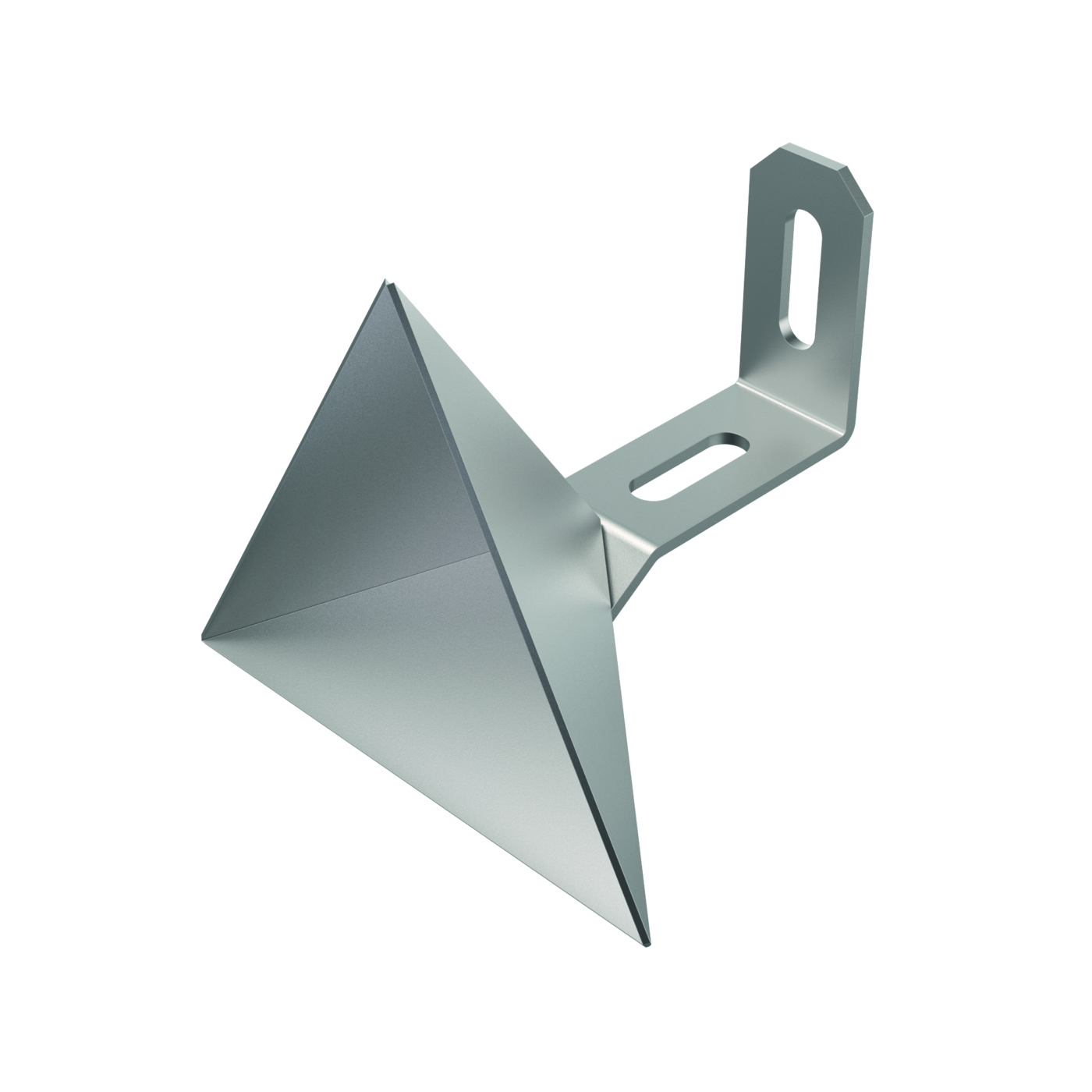
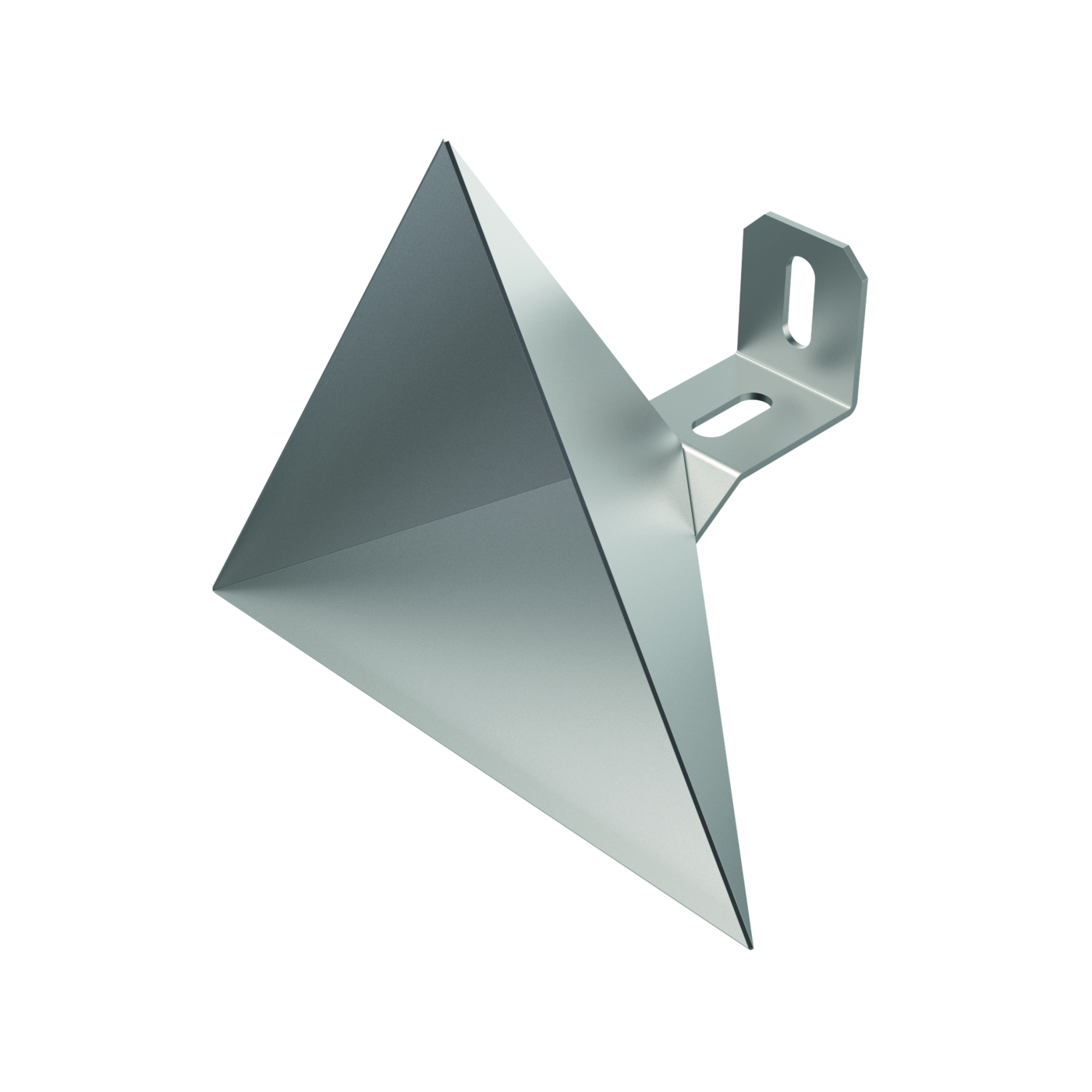
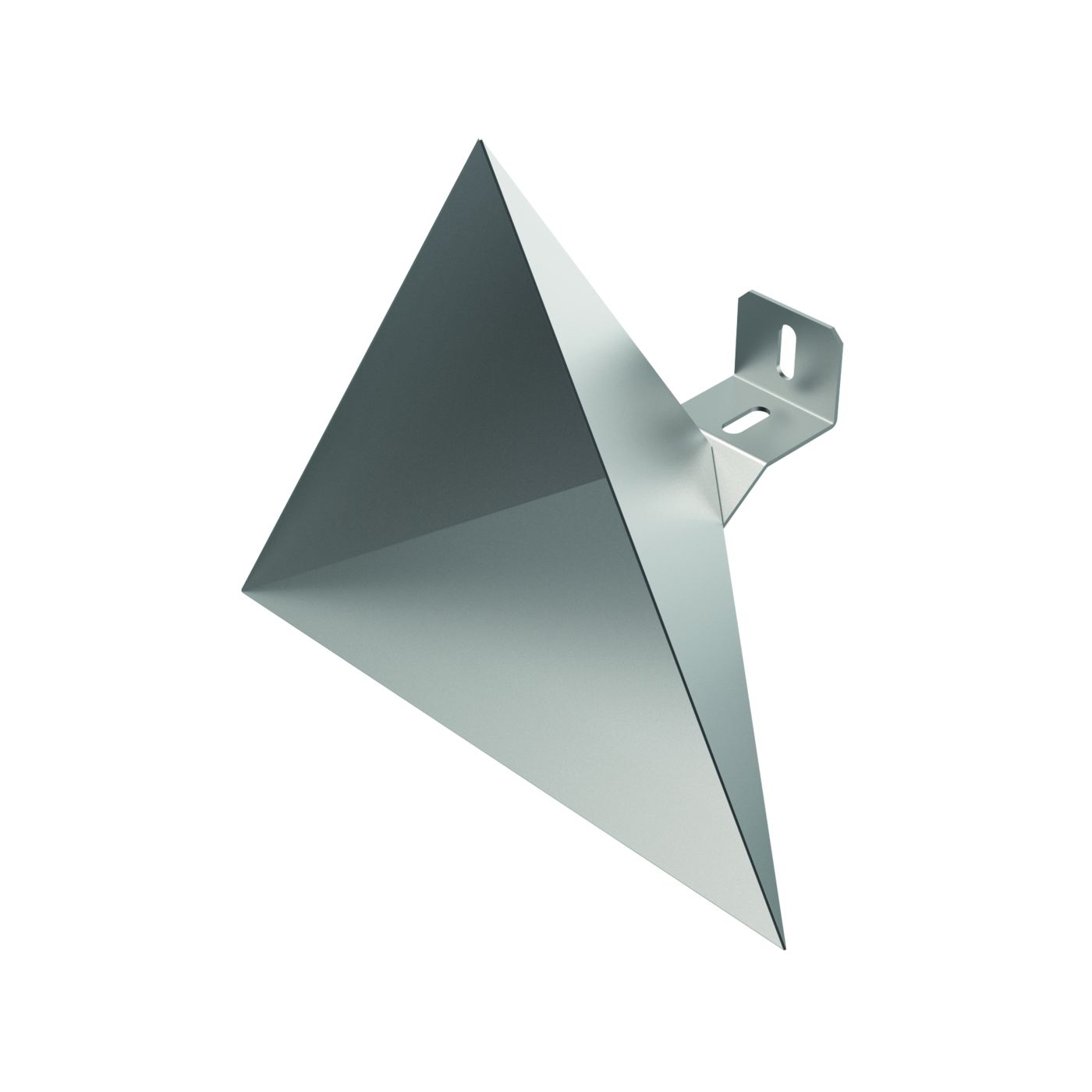
| Kantenlänge des Nennbetätigungselement | 100 mm |
| Funktion | Radartaster |
| Auflösung | 1 mm |
| Reichweite | von 0.35 bis 10 m |
| Hysterese | ≤ 50 mm |
| Mindestgröße Schaltbereich | 50 mm |
| Linearitätsfehler | ≤ ± 0.1 % |
| Öffnungswinkel | 10 ° |
| Wiederholpräzision | 2 mm |
| Frequenzbereich | von 122000000000 bis 123000000000 Hz |
| Mindestgröße Messbereich | 500 mm |
| Abstrahlleistung EIRP | 10 dBm |
- Aktuator- und Sensorleitung / PVC – Anschlussleitung6625025
-
 Aktuator- und Sensorleitung / PVC – Anschlussleitung6625013
Aktuator- und Sensorleitung / PVC – Anschlussleitung6625013 -
 Aktuator- und Sensorleitung / PVC – Verbindungsleitung6625208
Aktuator- und Sensorleitung / PVC – Verbindungsleitung6625208